
Josh Milthorpe
Computer Scientist, Oak Ridge National Laboratory
Efficient update of ghost regions using active messages
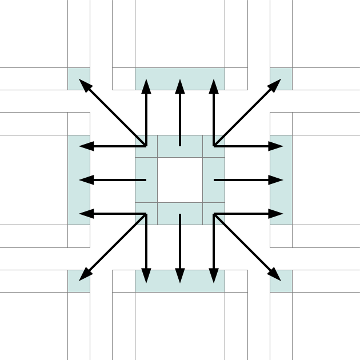
The use of ghost regions is a common feature of many distributed grid applications. A ghost region holds local read-only copies of remotely-held boundary data which are exchanged and cached many times over the course of a computation. X10 is a modern parallel programming language intended to support productive development of distributed applications. X10 supports the “active message” paradigm, which combines data transfer and computation in one-sided communications. A central feature of X10 is the distributed array, which distributes array data across multiple places, providing standard read and write operations as well as powerful high-level operations. We used active messages to implement ghost region updates for X10 distributed arrays using two different update algorithms. Our implementation exploits multiple levels of parallelism and avoids global synchronization; it also supports split-phase ghost updates, which allows for overlapping computation and communication. We compare the performance of these algorithms on two platforms: an Intel x86-64 cluster over QDR InfiniBand, and a Blue Gene/P system, using both stand-alone benchmarks and an example computational chemistry application code. Our results suggest that on a dynamically threaded architecture, a ghost region update using only pairwise synchronization exhibits superior scaling to an update that uses global collective synchronization.